光電編碼器,是一種通過光電轉換將輸出軸上的機械幾何位移量轉換成脈沖或數字量的傳感器。這是目前應用最多的傳感器,光電編碼器是由光柵盤和光電檢測裝置組成。光柵盤是在一定直徑的圓板上等分地開通若干個長方形孔。由于光電碼盤與電動機同軸,電動機旋轉時,光柵盤與電動機同速旋轉,經發光二極管等電子元件組成的檢測裝置檢測輸出若干脈沖信號,通過計算每秒光電編碼器輸出脈沖的個數就能反映當前電動機的轉速。此外,為判斷旋轉方向,碼盤還可提供相位相差90o的兩路脈沖信號。
光電編碼器簡介
光電編碼器(Optical Encoder)俗稱“單鍵飛梭”,其外觀好像一個電位器,因其外部有一個可以左右旋轉同時又可按下的旋鈕,很多設備(如顯示器、示波器等)用它作為人機交互接口。
光電編碼器原理
光電編碼器是利用光柵衍射原理實現位移-數字變換,通過光電轉換,將輸出軸上的機械幾何位移量轉換成脈沖數字量的傳感器.
常見的光電編碼器由光柵盤,發光元件和光敏元件組成.光柵實際上是一個刻有規則透光和不透光線條的圓盤,光敏元件接收的光通量隨透光線條同步變化,光敏元件輸出波形經整形后,變為脈沖信號,沒轉一圈,輸出一個脈沖.根據脈沖的變化,可以精確測量和控制設備位移量
光電編碼器的應用電路
EPC-755A光電編碼器的應用
EPC-755A光電編碼用具備良好的使用性能,在角度丈量、位移丈量時抗干擾能力很強,并具有穩定可靠的輸出脈沖信號,且該脈沖信號經計數后可得到被丈量的數字信號。因此,我們在研制汽車駕駛模擬器時,對方向盤旋轉角度的丈量選用EPC-755A光電編碼器作為傳感器,其輸出電路選用集電極開路型,輸出分辨率選用360個脈沖/圈,考慮到汽車方向盤轉動是雙向的,既可順時針旋轉,也可逆時針旋轉,需要對編碼器的輸出信號鑒相后才能計數。圖2給出了光電編碼器實際使用的鑒相與雙向計數電路,鑒相電路用1個D觸發器和2個與非門組成,計數電路用3片74LS193組成。
當光電編碼器順時針旋轉時,通道A輸出波形超前通道B輸出波形90°,D觸發器輸出Q(波形W1)為高電平,Q(波形W2)為低電平,上面與非門打開,計數脈沖通過(波形W3),送至雙向計數器74LS193的加脈沖輸進端CU,進行加法計數;此時,下面與非門封閉,其輸出為高電平(波形W4)。當光電編碼器逆時針旋轉時,通道A輸出波形比通道B輸出波形延遲90°,D觸發器輸出Q(波形W1)為低電平,Q(波形W2)為高電平,上面與非門封閉,其輸出為高電平(波形W3);此時,下面與非門打開,計數脈沖通過(波形W4),送至雙向計數器74LS193的減脈沖輸進端CD,進行減法計數。
汽車方向盤順時針和逆時針旋轉時,其最大旋轉角度均為兩圈半,選用分辨率為360個脈沖/圈的編碼器,其最大輸出脈沖數為900個;實際使用的計數電路用3片74LS193組成,在系統上電初始化時,先對其進行復位(CLR信號),再將其初值設為800H,即2048(LD信號);如此,當方向盤順時針旋轉時,計數電路的輸出范圍為2048~2948,當方向盤逆時針旋轉時,計數電路的輸出范圍為2048~1148;計數電路的數據輸出D0~D11送至數據處理電路。
實際使用時,方向盤頻繁地進行順時針和逆時針轉動,由于存在量化誤差,工作較長一段時間后,方向盤回中時計數電路輸出可能不是2048,而是有幾個字的偏差;為解決這一題目,我們增加了一個方向盤回中檢測電路,系統工作后,數據處理電路在模擬器處于非操縱狀態時,系統檢測回中檢測電路,若方向盤處于回中狀態,而計數電路的數據輸出不是2048,可對計數電路進行復位,并重新設置初值。
光電編碼器在重力丈量儀中的應用
采用旋轉式光電編碼器,把它的轉軸與重力丈量儀中補償旋鈕軸相連。重力丈量儀中補償旋鈕的角位移量轉化為某種電信號量;旋轉式光電編碼器分兩種,盡對編碼器和增量編碼器。
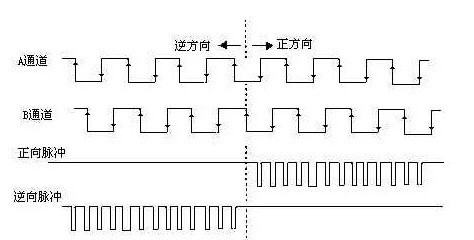
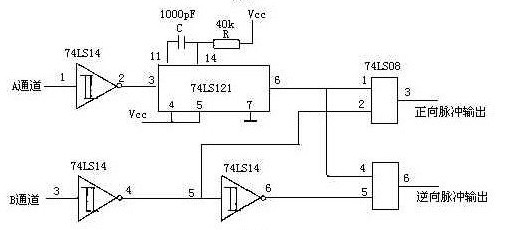
增量編碼器是以脈沖形式輸出的傳感器,其碼盤比盡對編碼器碼盤要簡單得多且分辨率更高。一般只需要三條碼道,這里的碼道實際上已不具有盡對編碼器碼道的意義,而是產生計數脈沖。它的碼盤的外道和中間道有數目相同均勻分布的透光和不透光的扇形區(光柵),但是兩道扇區相互錯開半個區。當碼盤轉動時,它的輸出信號是相位差為90°的A相和B相脈沖信號以及只有一條透光狹縫的第三碼道所產生的脈沖信號(它作為碼盤的基準位置,給計數系統提供一個初始的零位信號)。從A,B兩個輸出信號的相位關系(超前或滯后)可判定旋轉的方向。由圖3(a)可見,當碼盤正轉時,A道脈沖波形比B道超前π/2,而反轉時,A道脈沖比B道滯后π/2。圖3(b)是一實際電路,用A道整形波的下沿觸發單穩態產生的正脈沖與B道整形波相‘與’,當碼盤正轉時只有正向口脈沖輸出,反之,只有逆向口脈沖輸出。因此,增量編碼器是根據輸出脈沖源和脈沖計數來確定碼盤的轉動方向和相對角位移量。通常,若編碼器有N個(碼道)輸出信號,其相位差為π/ N,可計數脈沖為2N倍光柵數,現在N=2。圖3電路的缺點是有時會產生誤記脈沖造成誤差,這種情況出現在當某一道信號處于‘高’或‘低’電平狀態,而另一道信號正處于‘高’和 ‘低’之間的往返變化狀態,此時碼盤固然未產生位移,但是會產生單方向的輸出脈沖。例如,碼盤發生抖動或手動對準位置時(下面可以看到,在重力儀丈量時就會有這種情況)。
|
|
增量光電編碼器基本波形和電路圖
|
|
四倍計數計數方式的波形和電路圖
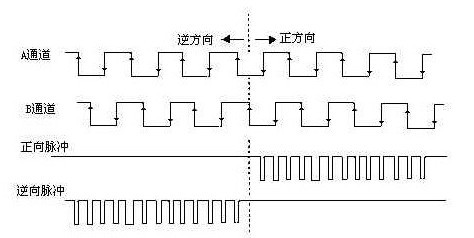
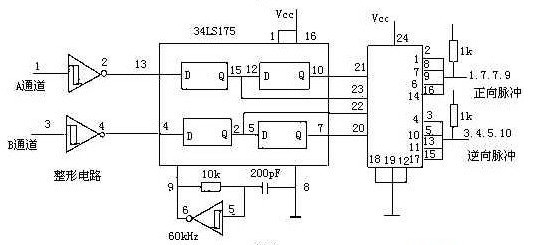
上圖是一個既能防止誤脈沖又能進步分辨率的四倍頻細分電路。在這里,采用了有記憶功能的D型觸發器和時鐘發生電路。由圖4可見,每一道有兩個D觸發器串接,這樣,在時鐘脈沖的間隔中,兩個Q端(如對應B道的74LS175的第2、7引腳)保持前兩個時鐘期的輸進狀態,若兩者相同,則表示時鐘間隔中無變化;否則,可以根據兩者關系判定出它的變化方向,從而產生‘正向’或‘反向’輸出脈沖。當某道由于振動在‘高’、‘低’間往復變化時,將交替產生‘正向’和‘反向’脈沖,這在對兩個計數器取代數和時就可消除它們的影響(下面儀器的讀數也將涉及這點)。由此可見,時鐘發生器的頻率應大于振動頻率的可能最大值。由圖4還可看出,在原一個脈沖信號的周期內,得到了四個計數脈沖。例如,原每圈脈沖數為1000的編碼器可產生4倍頻的脈沖數是4000個,其分辨率為0.09°。實際上,目前這類傳感器產品都將光敏元件輸出信號的放大整形等電路與傳感檢測元件封裝在一起,所以只要加上細分與計數電路就可以組成一個角位移丈量系統(74159是4-16譯碼器)。 本篇文章來由電子網收集整理轉載請以鏈接形式注明出處 網址:http://dz.siaaa.com/read.php?tid-459715-fpage-1.html
光電編碼器驅動程序的設計
光電編碼器與S3C2410的硬件接口
光電編碼器與S3C24lO的接口電路如圖4所示。光電編碼器的A、B相為集電極開路輸出,由于S3C2410的I/O口電平為3.3 V,所以將其通過電阻上拉到3.3V后再分別接到CPU的EINT0和EINT1上;將Pl直接接到3.3V,P2通過電阻下拉到GND。當旋鈕按下時,P2口輸出為高電平,否則輸出為低電平。
工作狀態下,將EINTO、EINTl配置成上升沿和下降沿均觸發的外部中斷,將EINT2配置成上升沿觸發的中斷,旋鈕按下時EINT2引腳產生上升沿觸發中斷。
外部中斷初始化及中斷服務程序的編寫
首先必須完成CPU的I/O口和中斷的初始化工作,然后再編寫中斷處理程序。具體分為4個步驟:
- 初始化I/O口。在Port[_]Init()函數中,將EINT0和EINTl初始化為上升沿和下降沿均觸發的中斷。將EINT2初始化為上升沿觸發的中斷。
- 添加中斷號。在oalint.h下添加光電編碼器中斷向量的宏定義。代碼為#define SYSINTR[_]OED(SYSINTR[_]FIRMWARE+20)
- 添加中斷的初始化、禁止、復位等函數,分別在OEMInterruptEnable()、OEMInterruptDisable()、OEM-InterruptDone()等函數中加入相關代碼。
- 返同中斷標識,由OEMInterruptHandler()函數返回中斷標識(SYSINTR[_]OED)。
編寫流接口驅動程序
Windows CE.net把中斷處理分成兩個部分:中斷服務程序(ISR)和中斷服務線程(IST)。TSR通常要求越短、越快越好,它的唯一任務就是返回中斷標識。正由于ISR很小,只能做少量的處理,因此中斷處理器就調用IST執行大多數的中斷處理。中斷服務線程(IST)在從waitForSingleObject()函數得到中斷已經發生的信號前一直保持空閑;當接收到中斷信號后,它就在本機設備驅動程序的PDD層調用子程序,這些程序反過來訪問硬件以獲得硬件的狀態。IST使用InterruptInitialize()函數來注冊自己,然后使用WaitForSingleObject()函數等待中斷信號。如果這時中斷信號到來,則應將光電編碼器的狀態記錄下來,保存在變量OED[_]Status中。OED[_]Status=1表示旋鈕按下,OED[_]Status=2表示旋鈕逆時針旋轉,OED[_]Status=3表示旋鈕順時針旋轉。
這里還有一種比較簡單的鑒相規則,具體步驟是,當創建線程時讀出EINTl的電平狀態并保存在變量PreEINTl中,每次中斷到來時首先判斷EINT2是否為高電平。如果為高電平,則說明按鈕按下;如果EINT2為低電平,則判斷EINTO電平是否與PreEINTl相同。如果相同,則說明旋鈕逆時針旋轉;反之,旋鈕順時針旋轉,判斷的流程如圖5所示。
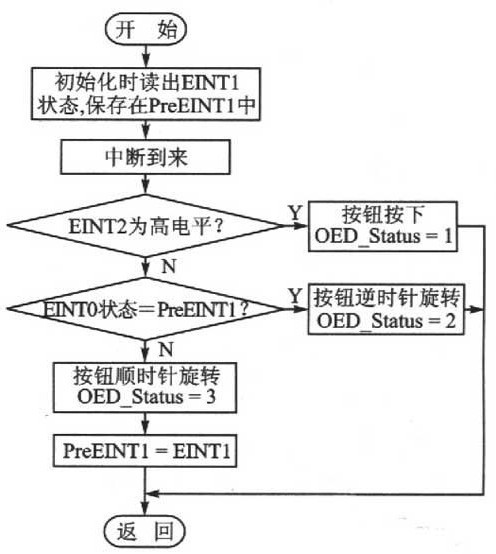
光電編碼器鑒相流程框圖
Windows CE流接口驅動程序模型要求驅動程序開發者編寫10個接口函數,針對光電編碼器的驅動主要應完成設備初始化和數據讀取2個函數的編寫。WindowsCE設備文件名前綴由3個大寫字母組成,操作系統使用這3個字母來識別與流接口驅動程序相對應的設備。這里定義設備文件名前綴為“OED”(Optical Encoder),其中設備初始化函數OED[_]Init()在Windows CE裝載驅動程序時用于創建中斷事件和中斷服務線程。在函數OED[_]Read()中將光電編碼器的狀態(OED[_]Status)返回。
封裝驅動程序并加入到WinCE中
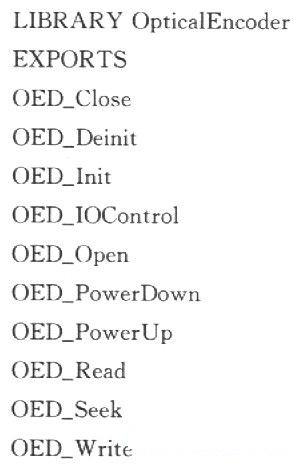
根據上述方法編譯出動態鏈接庫(DLL)還不夠,因為它的接口函數還沒有導出,還需要告訴鏈接程序輸出什么樣的函數,因此必須建立一個后綴名為def的文件。在本設計中為OpticalEnccder.def。下面是此文件的內容:
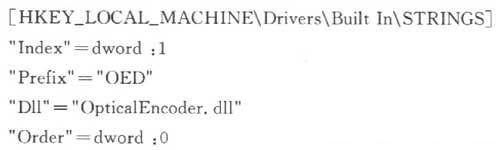
一個具體的流接口驅動程序和注冊表是密不可分的。向WinCE內核添加注冊表項的方法有兩種:一種是直接修改Platform Builder下的reg文件;另一種是自己編寫一個注冊表文件,通過添加組件的方法將動態鏈接庫文件添加到內核中。這里用第2種方法,將OpticalEncoder.dll添加到內核中。編寫的注冊表文件內容如下:
最后編寫一個CEC文件,完成對定制內核注冊表部分的修改并將OpticalEncoder.dll添加到系統內核中去,然后在Platform Builder中就可以直接添加已經編寫好的驅動程序了。




